Thursday, December 1, 2016
Week 15 (Nov 30 - Dec 7)
For slide 5, here is representation of it moving - https://gfycat.com/UntidyCandidBats
For slide 6, here is representation of it moving - https://gfycat.com/EquatorialGraveAustraliansilkyterrier#?speed=0.5
Wednesday, November 30, 2016
Week 14 (Nov 24 - Nov 30)
We have begun simulating the mechanism with the cabin model made by a previous team at Spartan Superway. Minor changes were made to the Cabin Model. It needed to be scaled down to half-scale. After that it was possible to reuse the mounting plate to attach it to the suspension assembly. We would have liked to connect it to the Bogie system as well but there were issues with that in SolidWorks. However, we will keep trying to integrate everything into the simulation.
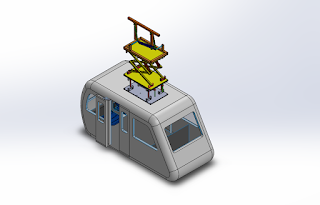

Figure 1 : Pod Car with Active Suspension
Wednesday, November 23, 2016
Week 13 (Nov 17 - Nov 23)
We have started working on presentations. My teammate and I are also reviewing our calculations for the force analysis on the four-bar tilt mechanism. We have also begun making designs for a mounting system for the cabin. We believe this is needed to properly simulate the suspension system with the cabin. Hopefully, this will show any issues or design constraints that need to be revised.
Monday, November 14, 2016
Week 12 (Nov 9 - Nov 16)
For this week we saw another instructor to talk about how to solve for different forces in a moving system. We want to make sure we did the right calculations before we start using FEA on our whole system, so that we would be on track according to our Gantt Chart.
Wednesday, November 2, 2016
Week 11 (Nov 2 - Nov 9)
Here is the Active Suspension's Presentation 2
In addition, we also started 3D printing some of our parts, which can be seen below.

In addition, we also started 3D printing some of our parts, which can be seen below.

Sunday, October 30, 2016
Week 10 (Oct 26 - Nov 2)
For this week as a team we are preparing for our presentation, making sure that we have everything covered. We also want to make sure that are calculations are correct by consulting different professors and going over what we did and plan to do.
Monday, October 24, 2016
Week 9 (Oct 19 - Oct 26)
For this week as a team we are working on our presentation. Making sure that we cover everything that is required, such as updating our current design, make sure the calculations are correct, etc.
Monday, October 17, 2016
Week 8 (10/12 - 10/19)
For the week of October 12 to October 19, we are in the process of figuring out how to combine each system. See pictures below for sketches of what we plan to do.




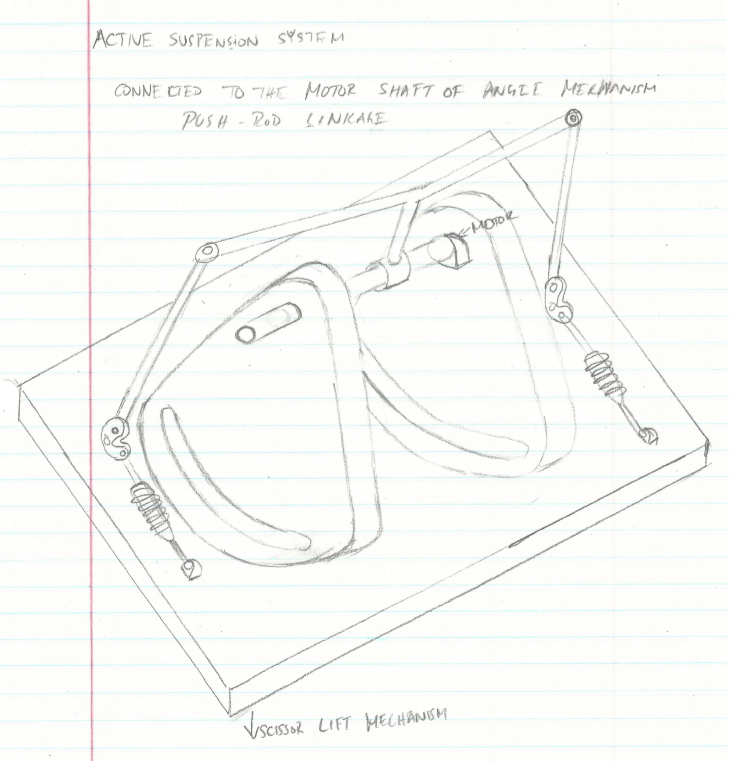
Figure 1: Sketch of tilt mechanism
Figure 1 is a rough sketch of the four bar mechanism we want to use based on previous CAD work.

Figure 2: How we plan to attach tilt mechanism to bogie
Figure 2 is a possible configuration to support the tilt mechanism and the self-leveling mechanism. The idea in this sketch was to support the tilt mechanism rigidly and then support the self-leveling mechanism at 4 points. The self-leveling mechanism is a square so we would make 4 tilt mechanisms that would connect at each corner.

Figure 3: How we plan to attach tilt mechanism to the self-leveling system
Figure 3 shows this idea with one tilt mechanism connected at one corner.
Tuesday, October 11, 2016
Week 7 (10/5 - 10/12)
As a team we are continuing to do the CAD drawings using Solid Works. We are also utilizing Grab Cad so that we can see how our design fits with all the other designs. Once we get that finished and the whole system looks like it can all work together then we can start to 3D print our system to get a prototype to test even more before the final design.
Wednesday, September 28, 2016
Friday, September 23, 2016
Week 5 (9/21-9/28)
For the week of September 21 - September 28 we basically worked on our presentation. Since this is our first presentation of the year we want to make sure we do everything right and spend a lot of time on it. This includes doing more research, the calculations, and any drawings we want to put on the presentation.
Wednesday, September 14, 2016
Active Suspension Week 4
We have updated our Gant Chart to include presentations, so we can start preparing for them.
 In addition we observed a video of an active suspension of a formula 1 racing car, which we modeled our current design after it. The video can be seen here:
In addition we observed a video of an active suspension of a formula 1 racing car, which we modeled our current design after it. The video can be seen here:
https://www.youtube.com/watch?v=hd2qhmx6hvI
We are also in the process of constructing the free body diagram for our system to determine the equation of motion.

https://www.youtube.com/watch?v=hd2qhmx6hvI
We are also in the process of constructing the free body diagram for our system to determine the equation of motion.
Wednesday, September 7, 2016
Active Suspension Team Week 3
Following the sketch we provided in our previous post. To demonstrate the idea we have included a couple videos as proof of concept.
Push Rod Suspension:
https://www.youtube.com/watch?v=Q3woJQBxtps
This video shows how a mechanical push rod suspension is used in a road application. We took this idea and thought it could be adapted to be used in the active suspension for the pod car. The advantages of the push rod suspension system are that they are compact and serviceable.
Four bar Crank Rocker:
https://www.youtube.com/watch?v=4tIo3AQQiU8
This video is to show an example of a crank rocker mechanism. This could be used in a mechatronic system design to level the cabin as it ascends or descends. This system has the advantage of being simple to program and simple to build.

Push Rod Suspension:
https://www.youtube.com/watch?v=Q3woJQBxtps
This video shows how a mechanical push rod suspension is used in a road application. We took this idea and thought it could be adapted to be used in the active suspension for the pod car. The advantages of the push rod suspension system are that they are compact and serviceable.
Four bar Crank Rocker:
https://www.youtube.com/watch?v=4tIo3AQQiU8
This video is to show an example of a crank rocker mechanism. This could be used in a mechatronic system design to level the cabin as it ascends or descends. This system has the advantage of being simple to program and simple to build.

Wednesday, August 31, 2016
Spartan Superway Suspension 2016-2017
Neil Dey
Skills:
Solidworks, PTC Creo 2.0, MATLAB, Python, FEA, Labview
Contact information: (631) 682-7394
email : neilshankar@yahoo.com
Responsibilities:
Brean Aquino
Skills: PTC Creo/Solidworks, Trace, Labview
Contact information: 510-565-4575 aquinobrean@yahoo.com
Responsibilities:
Proposal Narrative: The suspension system must isolate vibration in the vertical axis due to the bogie wheels rolling against the overhead track.
Design Requirements:
Sketch



Gantt Chart:

Estimated Budget: Around $2,000
Skills:
Solidworks, PTC Creo 2.0, MATLAB, Python, FEA, Labview
Contact information: (631) 682-7394
Responsibilities:
Brean Aquino
Skills: PTC Creo/Solidworks, Trace, Labview
Contact information: 510-565-4575 aquinobrean@yahoo.com
Responsibilities:
Proposal Narrative: The suspension system must isolate vibration in the vertical axis due to the bogie wheels rolling against the overhead track.
Design Requirements:
1.
The cabin must be must maintain a horizontal angle (parallel with respect to ground). Max Angle of incline/decline assumed to be 17 degrees.
2.
The suspension system should constrain the movement of the cabin such that there are only
two degrees of freedom (2 DOF).
3.
A damping system will be needed to isolate the cabin from vibrations and oscillatory motion.
4.
The suspension system must be capable of self-leveling the cabin to the station platform.
5.
The suspension system must interface to both the cabin and the bogie.
6.
All components and hardware must have a sufficient safety factor associated with the forces
and stresses imposed by static and dynamic loading.
Sketch


Gantt Chart:

Estimated Budget: Around $2,000
Subscribe to:
Comments (Atom)